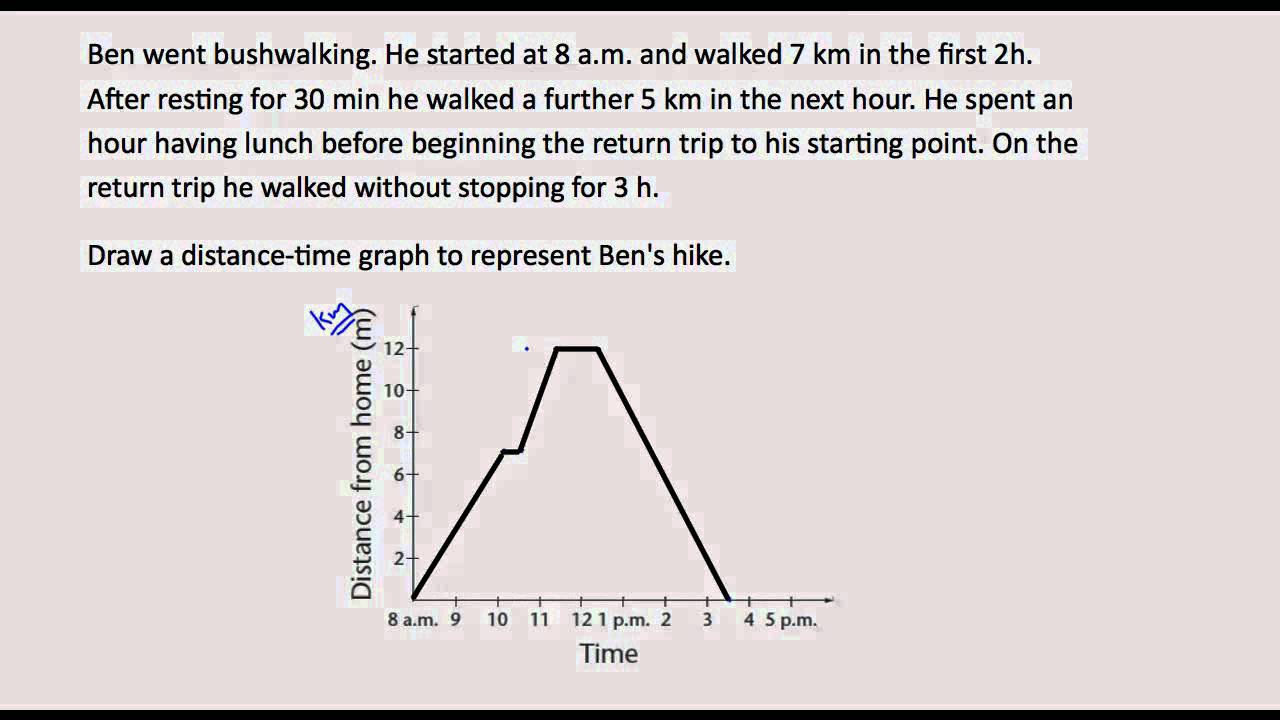
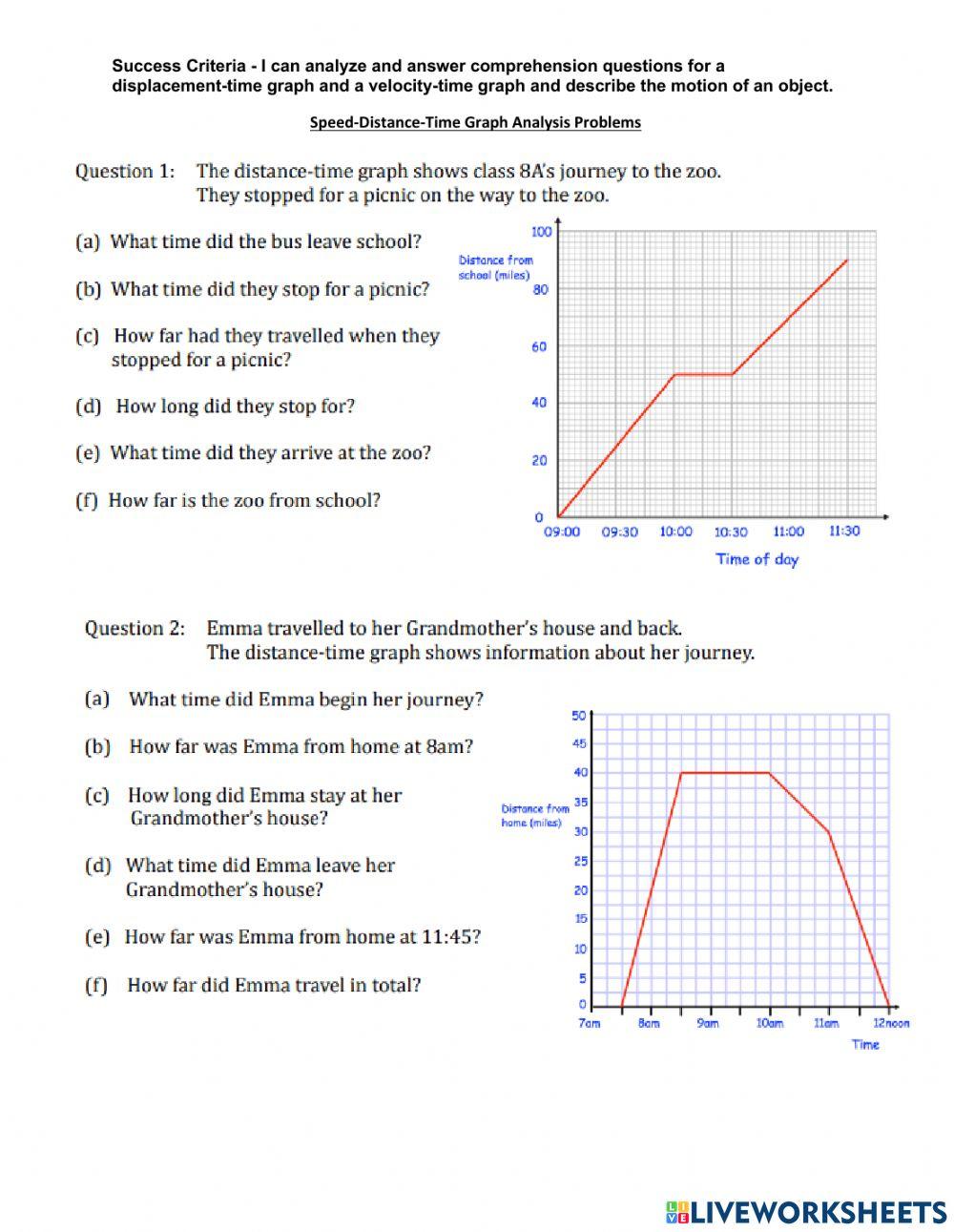
A14b – Plotting and interpreting graphs in real contexts to find approximate solutions to problems such as simple kinematic problems –
Por um escritor misterioso
Descrição
SYLLABUS OF ENGINEERING PHYSICS - Dr.K.N.MODI UNIVERSITY
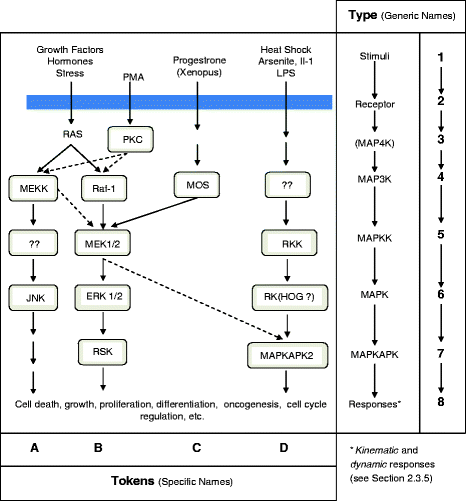
Whole Cells SpringerLink

US7966154B2 - Pressure sensing systems for sports, and associated methods - Google Patents
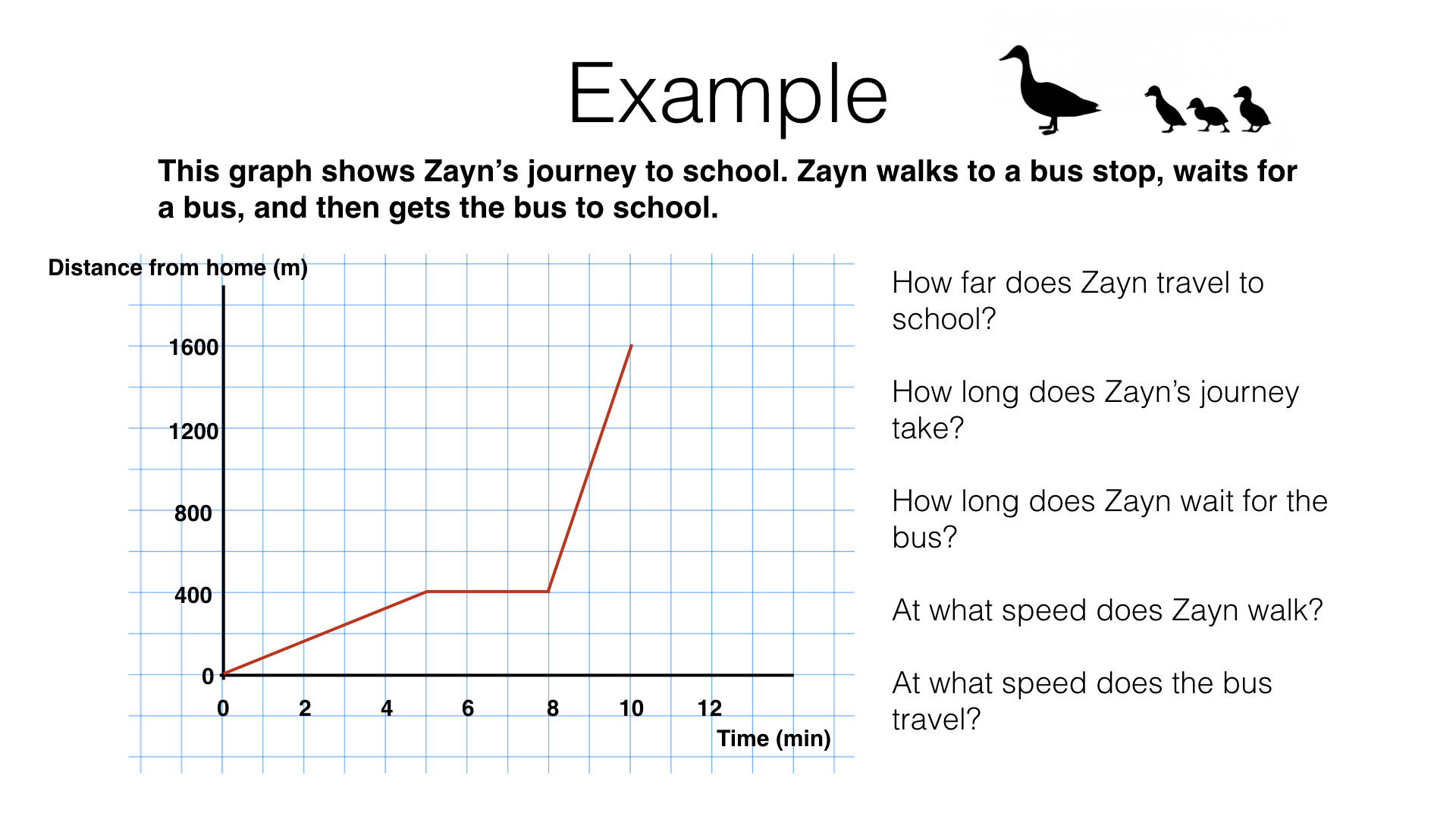
A14b – Plotting and interpreting graphs in real contexts to find approximate solutions to problems such as simple kinematic problems –
Kinematic Equations and Kinematic Graphs
Whole Cells SpringerLink

Dense Omnidirectional RGB‐D Mapping of Large‐scale Outdoor Environments for Real‐time Localization and Autonomous Navigation - Meilland - 2015 - Journal of Field Robotics - Wiley Online Library

Lattice Boltzmann method–based efficient GPU simulator for vapor transport in the boundary layer over a moist soil: Development and experimental validation - ScienceDirect

ex1-1.htm

Dense Omnidirectional RGB‐D Mapping of Large‐scale Outdoor Environments for Real‐time Localization and Autonomous Navigation - Meilland - 2015 - Journal of Field Robotics - Wiley Online Library
de
por adulto (o preço varia de acordo com o tamanho do grupo)